This project tackles the design of a 4-arms system with application to laparoscopic surgery. Currently, this task is performed by at least two people: the surgeon and one assistant who is manipulating the endoscope and the retractor. The envisioned 4-arms system would enable the surgeon to control all four instruments. This may increase synchrony in the movements and avoid ambiguity arising from miscommunication.
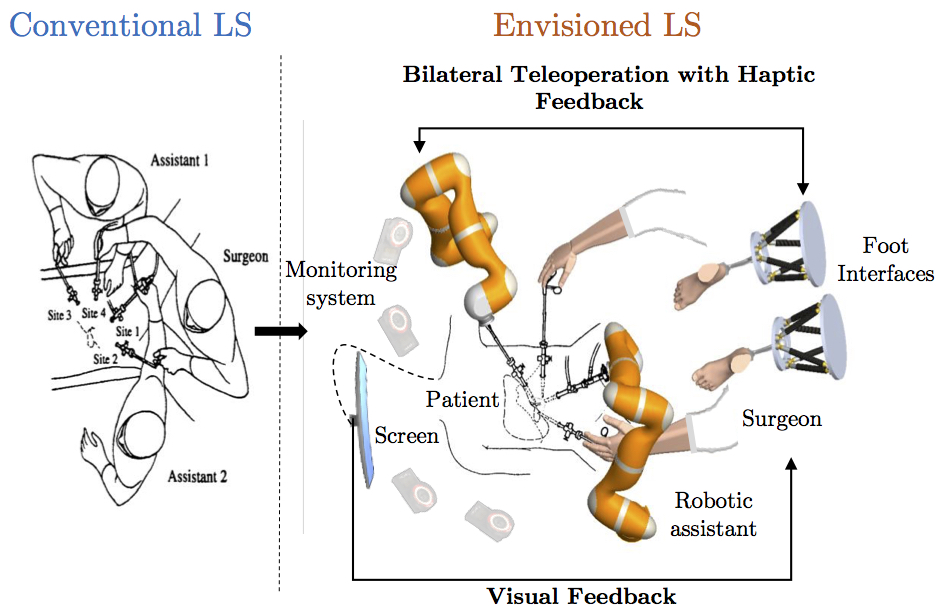
This project participates in a novel research area in human-robot interaction that develops supernumerary devices to augment human natural dexterity. Our 4-arms system will consist of two supplementary robotic arms driven by the user’s feet. In this way simultaneous coordinated control of four arms by a single user will be attempted for a complex manipulation task, for the first time to our knowledge. To ease the control of the two supplementary arms, we will provide the robotic arms with partial autonomy. Low-level control for forces at contact and for precise trajectory following will be done autonomously, while the direction of movement will be initiated by the user. To provide this autonomy, we will use learning approaches to model the expected task features in force and task domains. Additionally, we will study how dyads of surgeons perform this task to model the typical dynamics of coordination in the dyad. This will inform the design of proactive robotic controllers to better anticipate the user’s requests.
The design of the system will be informed all along through user studies conducted with surgeons and using a simulated surgical environment.
Acknowledgements
This project is conducted by the Learning Algorithms and Systems Laboratory (LASA) and the Robotic Systems Laboratory (LSRO) at the Ecole Polytechnique Fédérale de Lausanne (EPFL).
This project “Four-Armed Manipulation with Robot Assisted Laparoscopic Surgery” is supported by the Hasler Foundation.
![]()
This project involves a collaboration with the Swiss Foundation for Innovation and Training in Surgery (SFITS) at the Hopitaux Universitaires de Genève (HUG).
This website follows EPFL Regulations on Data Protection.